
Система контролю кутової стабільності лінійного п’єзоелектричного двигуна
Бічна панель сторінки статті
Основний зміст сторінки статті
Анотація
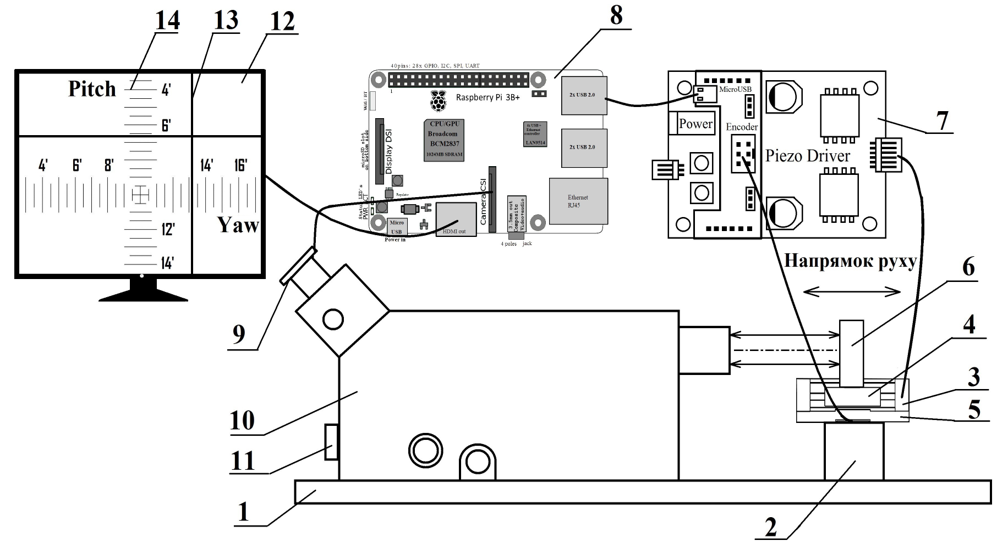
В роботі розглянуто систему контролю кутової стабільності лінійного п’єзоелектричного двигуна високої роздільної здатності на базі автоколіматора з цифровою обробкою інформації. На основі цієї системи проведено дослідження прямолінійності ходу лінійного п’єзоелектричного двигуна типу LPM5/BSP-1540SL, а саме його кутових переміщень Pitch(θy), Yaw(θz) та Roll(θx). Показана можливість вимірювання кутової стабільності на великій дистанції переміщення з точністю ~5кут.с. На основі отриманих експериментальних результатів встановлено, що найбільшим змінам зазнають кути Pitch та Roll (~3 кут.хвилин). Отримані результати вимінювання кутів Pitch, Yaw та Roll дозволяють провести розробку моделі похибок багатовісьової мікроманіпуляційної системи з метою врахування їх при проектуванні системи керування.
Блок інформації про статтю

Ця робота ліцензується відповідно до Creative Commons Attribution 4.0 International License.
Автори, які публікуються у цьому журналі, погоджуються з наступними умовами:
- Автори залишають за собою право на авторство своєї роботи та передають журналу право першої публікації цієї роботи на умовах ліцензії Creative Commons Attribution License, котра дозволяє іншим особам вільно розповсюджувати опубліковану роботу з обов'язковим посиланням на авторів оригінальної роботи та першу публікацію роботи у цьому журналі.
- Автори мають право укладати самостійні додаткові угоди щодо неексклюзивного розповсюдження роботи у тому вигляді, в якому вона була опублікована цим журналом (наприклад, розміщувати роботу в електронному сховищі установи або публікувати у складі монографії), за умови збереження посилання на першу публікацію роботи у цьому журналі.
- Політика журналу дозволяє і заохочує розміщення авторами в мережі Інтернет (наприклад, у сховищах установ або на особистих веб-сайтах) рукопису роботи, як до подання цього рукопису до редакції, так і під час його редакційного опрацювання, оскільки це сприяє виникненню продуктивної наукової дискусії та позитивно позначається на оперативності та динаміці цитування опублікованої роботи (див. The Effect of Open Access).
Посилання
V. Koledov, V. Shavrov, S. Gratowski and etc., " Practical System for Nanomanipulation," in International Conference on Manipulation, Manufacturing and Measurement on the Nanoscale (3M-Nano), Taipei, 2014. DOI: 10.1109/3M-NANO.2014.7057347
S. F. Petrenko, P`ezoe`lektricheskij dvigatel` v priborostroenii, Kornijchuk, 2002.
V. Zhelyaskov, "Piezoelectric Quasi-Resonance Linear Motors Based on Acoustic Standing Wave With Combined Resonator". USA Patent 8,710,719 B2, 2014.
S. Petrenko, V. Lavrinenko and V. Zhelyaskov, "Piezoelectric linear motor". USA Patent 9,705,425 B2, 2017.
"IKO International," USA: IKO International, Inc. / Nippon Thompson Co., Ltd, 2019. [Online]. Available: http://www.ikont.com/.
S. Petrenko, A. Omelian, O. Lysenko and V. Antonyuk, "Doslidzhennya suputn`ogo udarno-vibraczijnogo shumu p'yezoelektrichnogo dviguna v rezhimi mikro- ta nanoshvidkostej," NTUU “KPI`”, Seri`ya Radi`otekhni`ka, no. 78, pp. 67-73, 2019. DOI: 10.20535/RADAP.2019.78.67-73
R. Faty`khova, Kontrol` optiko-mekhanicheskikh priborov: Uchebnoe posobie, Moskva: Mashinostroenie, 1988.
E. Leun and M. Korenev, "Ustrojstvo dlya izmereniya otklonenij ot pryamolinejnosti". Rosijskaya Federacziya Patent 96103210, 20 04 1998.
"iC Haus," Germany: iC Haus [Online]. Available: http://www.ichaus.de.
"Raspberry PI," UK: Raspberry PI. [Online]. Available: http://www.raspberrypi.org.
R. Gonsales and R. Vuds, Czifrovaya obrabotka izobrazhenij, Moskva: Tekhnosfera, 2005.



